Košarica je prazna
Robotska celica za avtomatizacijo preizkušanja, laserskega označevanja in etiketiranja avtomobilskih luči
Tehnično napredna rešitev za stabilen takt, višjo produktivnost in zanesljivo kakovost v avtomobilski industriji

Za naročnika iz avtomobilske industrije smo zasnovali in izdelali namensko robotsko celico, namenjeno avtomatiziranemu posluževanju obstoječih procesnih strojev za obdelavo avtomobilskih luči. Celica povezuje testiranje tesnosti, lasersko označevanje, kontaktiranje in etiketiranje v enoten, ponovljiv in varen proces. Rešitev temelji na uporabi dveh industrijskih robotov, specialno razvitih prijemal, menjalnih postaj ter ločenih izhodnih transporterjev za dobre in slabe kose.
Izhodiščni izziv - Naročnik se je soočal z izzivi pri doseganju zahtevanega taktnega časa, visoko odvisnostjo od ročnega dela ter povečanim tveganjem za napake in poškodbe izdelkov med ročno manipulacijo. Obstoječi proces je zahteval do 5 operaterjev, pri čemer je bila učinkovitost močno odvisna od človeškega faktorja. Poleg tega je bilo potrebno zagotoviti zanesljivo ločevanje dobrih in slabih kosov ter integracijo že obstoječih strojev v enoten avtomatiziran sistem.
Rezultat - Z robotizacijo procesa je naročnik dosegel stabilen taktni čas 47 sekund na par in višjo produktivnost z neprekinjenim avtomatskim delovanjem. Število potrebnih operaterjev se je zmanjšalo s 5 na 1, hkrati pa so se odpravile poškodbe izdelkov zaradi ročne manipulacije. Proces je postal manj občutljiv na človeške napake, slabi kosi pa se zanesljivo izločijo že v zgodnjih fazah obdelave.
Opis rešitve
Robotska celica je zasnovana okoli treh obstoječih strojev naročnika:
- sistema za testiranje tesnosti avtomobilskih luči,
- stroja za lasersko označevanje,
- in naprave za kontaktiranje.
Vhod v celico predstavlja delovna miza z namenskimi ležišči. Operater izvede le vnos kosov potrdi pristnost kosa v ležiščih s tipko, nato celica deluje popolnoma avtomatsko. Dva industrijska robota sta programsko sinhronizirana in si delita naloge ter delovni prostor, kar omogoča optimalen izkoristek časa in prostora. Na koncu procesa se luči ločijo na dobre in slabe kose, čemur služita dva ločena izhodna transporterja.
Sistem je zasnovan modularno, kar omogoča prilagoditve za različne tipe luči, spremembe procesov ali integracijo dodatnih operacij v prihodnosti.

Vnos luči na vhodno delovno mizo z ležišči
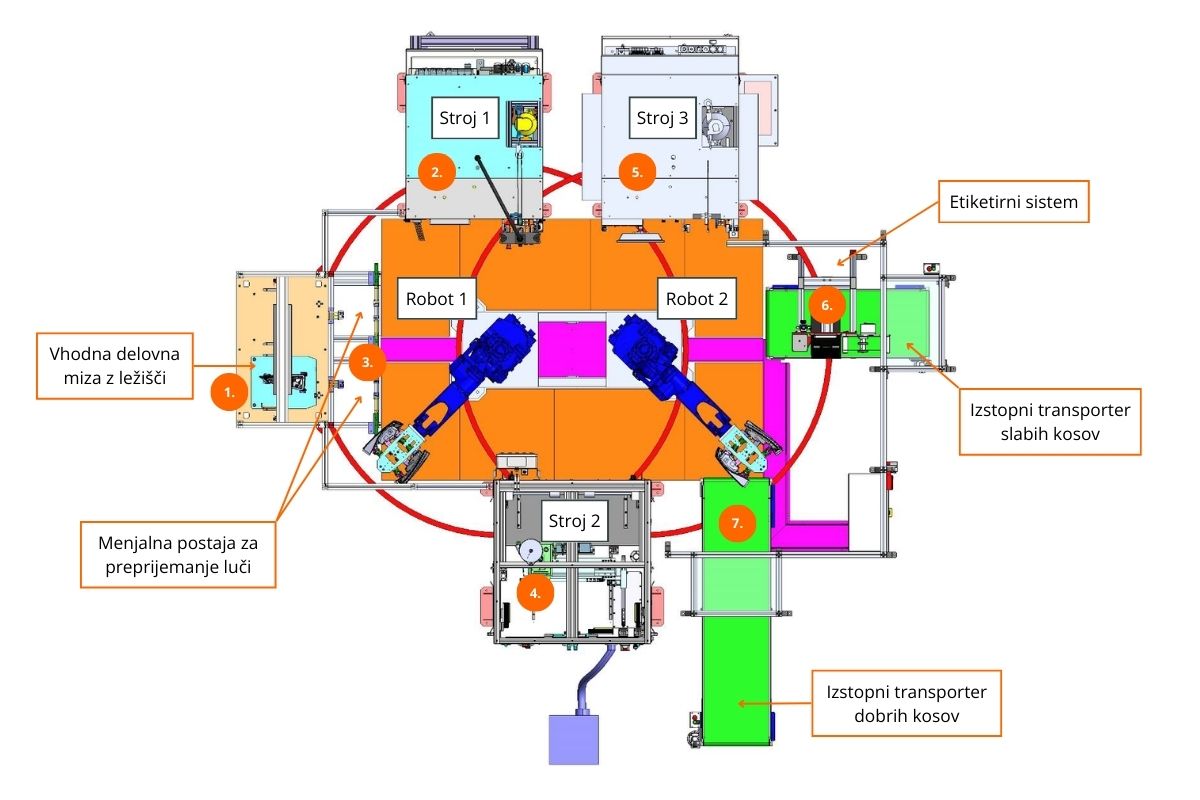
Proces delovanja robotske celice
1. Operater vstavi avtomobilske luči v vhodna ležišča namenske delovne mize in s pritiskom na tipko potrdi prisotnost luči v ležiščih.
2. Robot 1 odvzame luči iz ležišč in ju prenese v stroj 1, kjer se izvaja testiranje tesnjenja luči.
3. Po končanem testiranju robot 1 odvzame luči iz stroja 1 in jih prenese v menjalno postajo za preprijemanje luči.
4. Ustrezne kose luči robot 1 prenese v stroj 2, kjer se izvaja lasersko označevanje.
5. Naloge prevzame robot 2, ki odvzame luči iz laserskega stroja ter jih prenese v stroj 3, kjer se izvede kontaktiranje in funkcijska potrditev luči.
6. Po končani operaciji robot 2 odnese luči, do naprave za etiketiranje, kjer se aplicira EOL etiketa ali etiketa slabega kosa.
7. Robot 2 loči dobre kose od slabih in jih odloži na ustrezen izhodni transporter. Ločeno dobre in slabe kose.
8. Celica nadaljuje z naslednjim ciklom brez prekinitve.
Naša rešitev vključuje
- dva industrijska robota,
- namenski robotski prijemali,
- vhodno delovno mizo z ležišči,
- menjalne postaje za preprijemanje izdelkov,
- etiketirni sistem,
- izhodni transporter za dobre kose,
- izhodni transporter za slabe kose,
- varnostno ograjo z nadzorom dostopa,
- centralno krmilje in komunikacijo z obstoječimi stroji.
Robotska celica je le en primer naših namenskih rešitev za avtomobilsko industrijo. Oglejte si še druge projekte, ki smo jih uspešno izvedli za naročnike iz avtomobilskega sektorja.
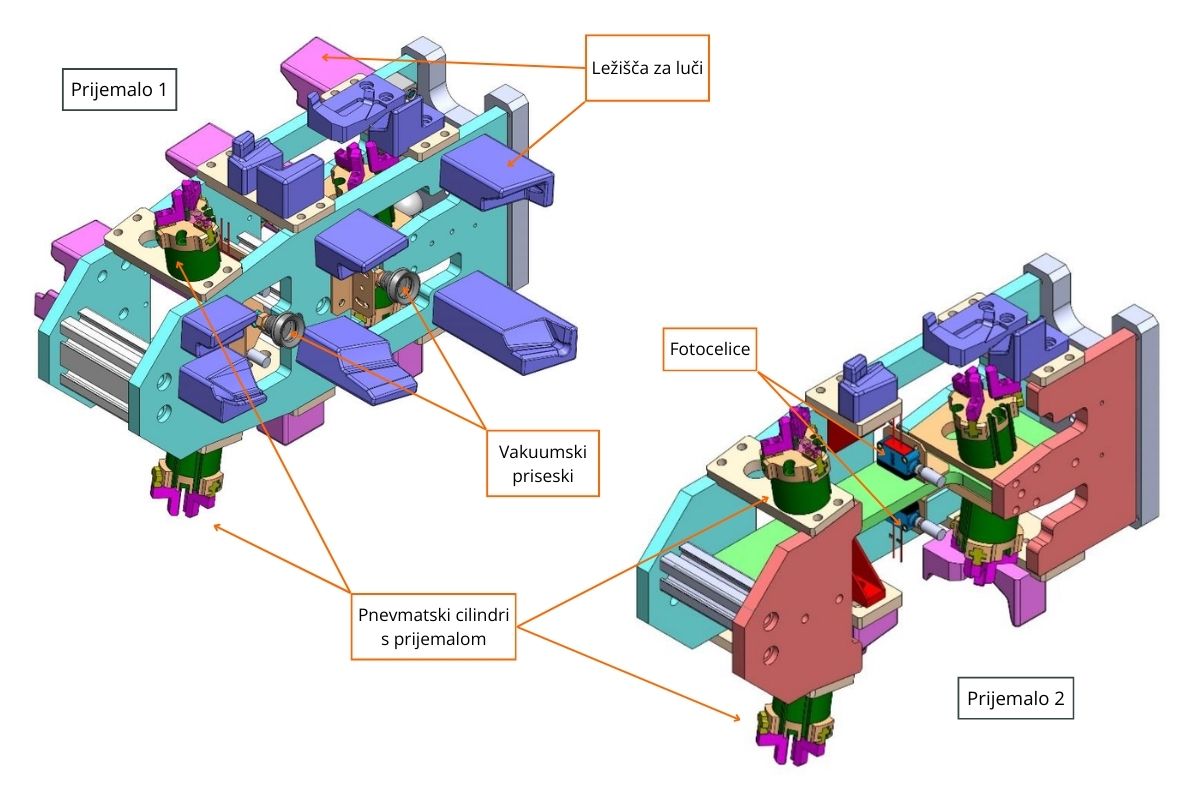
Namenski robotski prijemali
Za zanesljivo in varno manipulacijo avtomobilskih luči smo razvili namenski robotski prijemali, prilagojeni geometriji, masi in občutljivosti luči. Prijemali omogočata stabilno rokovanje z lučmi skozi vse faze procesa, brez poškodb površin in z visoko ponovljivostjo pozicioniranja.
Prijemalo 1 združuje mehanski in vakuumski prijem, pri čemer se izdelek natančno pozicionira v plastičnih naslonih. Stabilen oprijem zagotavljajo vakuumski priseski in pnevmatske mehanske komponente, zato je manipulacija zanesljiva tudi pri zahtevnejših orientacijah ter dinamičnih prenosih med postajami. Prisotnost kosa se pri mehanskem prijemu preverja s fotocelicama, pri vakuumskem delu pa dodatno z nadzorom vakuuma, kar bistveno povečuje procesno varnost in preprečuje napake pri prenosu.
Prijemalo 2 temelji na mehanskem pnevmatskem prijemu in je zasnovano za ponovljivo, stabilno vpenjanje ter natančno pozicioniranje izdelkov v procesnih strojih. Prisotnost kosa se nadzira s fotocelicami, kar omogoča zanesljivo delovanje pri taktni proizvodnji ter zmanjšuje možnost izpustov ali nepravilnega odlaganja izdelka.
Takšna zasnova prijemal omogoča visoko procesno stabilnost, kratke čase cikla in zanesljivo delovanje v serijski proizvodnji, hkrati pa zagotavlja fleksibilnost za prilagoditve različnim izvedbam avtomobilskih luči.
Učinki avtomatizacije se v industrijskih procesih ne kažejo le v stabilnejšem taktu in višji kakovosti, temveč tudi v jasno merljivih ekonomskih kazalnikih. Pri tovrstnih projektih so ključni dejavniki predvsem zmanjšanje potrebe po ročnem delu, število izmen, letni stroški zaposlenih ter amortizacija investicije.
Izračunajte donosnost avtomatizacije za vaš proces
Za hitro oceno finančnega učinka avtomatizacije lahko z našim ROI kalkulatorjem preverite čas povračila investicije in potencialne letne prihranke.
Robotska celica za avtomobilske luči