Košarica je prazna
Robotska celica za avtomatizacijo vstavljanja tipk v maske tipkovnic
Tehnično napredna in učinkovita rešitev za višjo produktivnost in zanesljivo kakovost v industriji elektronike.

Zaradi vse večjih proizvodnih količin in vedno višjih zahtev po kakovosti se proizvajalci računalniških tipkovnic vse pogosteje soočajo z omejitvami ročnega dela. V konkretnem primeru je stranka tipke v maske tipkovnic do sedaj vstavljala ročno, kar je zahtevalo veliko število delavcev ter hkrati predstavljalo pomemben izziv z vidika ponovljivosti in kakovosti procesa.
Tipke so izredno majhne, njihova pravilna orientacija pa je ključnega pomena za nadaljnjo funkcionalnost tipkovnice. Zaradi zelo majhnih kontaktov je pravilno orientacijo s prostim očesom težko zaznati, kar je pogosto vodilo do napak, izmeta in dodatnih kontrolnih postopkov.
Opis rešitve
Za odpravo navedenih težav smo razvili namensko robotsko celico, ki v celoti avtomatizira proces vstavljanja tipk v maske tipkovnic. Srce sistema predstavlja vibracijska posoda s kompleksnim sistemom mehanskega orientiranja, ki zagotavlja, da so tipke ob prihodu na odvzemno mesto vedno pravilno pripravljene za manipulacijo.
Natančna orientacija s pomočjo optičnega sistema
Na mestu odvzema je nameščen optični senzor, ki preveri orientacijo posamezne tipke. Sistem izmeri orientacijo kosa ter te informacije v realnem času posreduje robotu. S tem je zagotovljeno, da robot prevzame informacijo o orientaciji tipke pred vstavljanjem, kar je bistvena zahteva za kakovost končnega izdelka in odpravi človeške napake.
Prijemalo s kompenzacijo
Pnevmatsko štiri prstno prijemalo poskrbi za natančen prijem tipk na majhni površini in hkrati poravna tipko vzporedno z masko, ki čaka v vpenjalni pripravi. Tipke se vstavljajo z določeno silo, ki jo kompenziramo z natančnim vodenjem in vzmetno kompenzacijo po Z osi prijemala.

Delovna površina z maskami v ležiščih
Hitrost in uporabnost
V eni robotski celici je nameščenih osem mask, vsaka pa vsebuje 128 pozicij za tipke. To pomeni, da robot v enem ciklu položi več kot 1000 tipk, kar predstavlja izjemno povečanje produktivnosti v primerjavi z ročnim delom.
Operater ima preko preglednega grafičnega uporabniškega vmesnika možnost izbire, v katere maske bo robot vstavljal tipke. Takšna zasnova omogoča visoko stopnjo fleksibilnosti, enostavno prilagajanje proizvodnje ter hitro menjavo serij brez dolgotrajnih nastavitev.
Prednosti uvedbe robotske celice
Z uvedbo robotske celice je stranka dosegla:
- bistveno zmanjšanje potrebe po ročnem delu,
- večjo ponovljivost in stabilno kakovost procesa,
- odpravo napak zaradi napačne orientacije tipk,
- višjo produktivnost in krajše čase ciklov,
- večjo ergonomijo in razbremenitev operaterjev
- Visoka produktivnost in prilagodljivost
Avtomatizacija procesa vstavljanja tipk v maske tipkovnic tako predstavlja pomemben korak k sodobni, učinkoviti in konkurenčni proizvodnji, ki je pripravljena na zahteve prihodnosti.
Varnost v skladu z najvišjimi industrijskimi standardi
Posebna pozornost je bila pri razvoju robotske celice namenjena varnosti operaterjev in skladnosti z veljavnimi varnostnimi standardi za industrijsko avtomatizacijo. Celotna rešitev je zasnovana in izdelana v skladu z aktualnimi evropskimi varnostnimi normami in direktivami, vključno z zahtevami za stroje in robotske sisteme v industrijskem okolju.
Robotska celica je posredno in neposredno zaščitena z ustreznimi varnostnimi ohišji ter jasno definiranimi dostopnimi conami. Za varovanje območja gibanja robota so vgrajene varnostne svetlobne zavese najvišje varnostne kategorije, ki zagotavljajo zanesljivo zaznavo vstopa v nevarno območje. Ob prekinitvi svetlobnega polja se robotski sistem nemudoma in varno zaustavi, s čimer se prepreči možnost poškodb ali nevarnih situacij.
Takšna celostna varnostna zasnova omogoča nemoteno in varno delo operaterjev, hkrati pa zagotavlja, da robotska celica izpolnjuje vse zahteve za varno uporabo v industrijskem proizvodnem okolju.
Proces delovanja robotske celice
1. Operater vstavi maske v ležišča
2. Operater vsuje tipke v vibracijski zalogovnik
3. Operater si na grafičnem vmesniku izbere katere maske želi napolniti in pritisne start
4. Robot vstavi tipke v maske
Grafični vmesnik
GUI oz. Graphical User Interface nam omogoča individualne prilagoditve grafičnega prikaza procesa in različne možnosti prikaza upravljalnih elementov kot so: start/stop, zibor režima delovanja, izbor mask, vrnitev v izhodiščni položaj, vklop/izklop razsvetljave,...
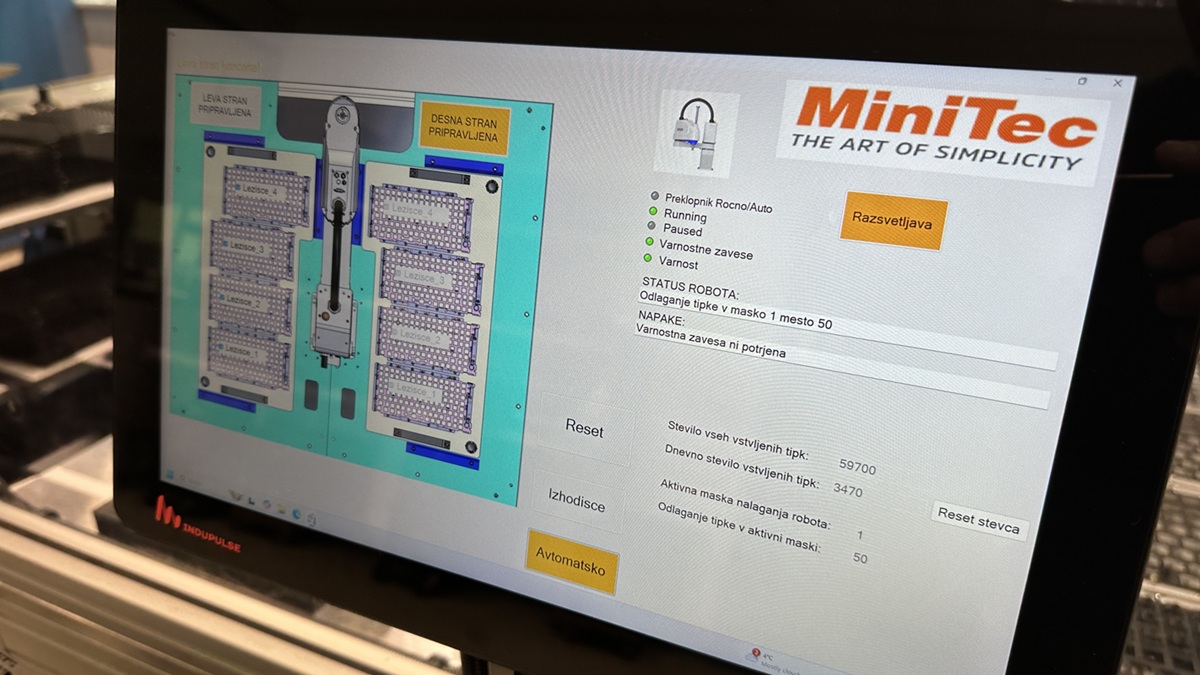
Grafični vmesnik operaterja
Naša rešitev vključuje
- ogrodje iz alu profilov z osnovno ploščo iz strojno obdelanega aluminija,
- namensko robotsko prijemalo,
- vibracijsko posodo za sortiranje in orientiranje tipk,
- linearno vibracijsko drčo za postavitev tipk,
- sistem orientacijo in pripravo tipke v položaj odvzema robota,
- optični senzor za zaznavanje orientacije tipke,
- ležišča za hitro in enostavno vpetje mask,
- zaščitno ogrodje z varnostnimi svetlobnimi zavesami,
- elektro krmilna omara,
- grafični vmesnik za operaterja.
Robotska celica je le en primer naših namenskih rešitev za industrijo elektronike. Oglejte si še druge projekte, ki smo jih uspešno izvedli za naročnike.
Izračunajte donosnost avtomatizacije za vaš proces
Za hitro oceno finančnega učinka avtomatizacije lahko z našim ROI kalkulatorjem preverite čas povračila investicije in potencialne letne prihranke.